
同方鼎欣经过多年研发,已经形成以多领域医疗图像应用软件开发与运行平台为特色的,完整医疗影像工作站整体软件解决方案。
简介
同方鼎欣研发的骨科手术机器人导航系统,提供稳定可靠的智能医学影像处理、分析、传输、智能诊疗系统等技术支持,帮助机器人完成各项精确操作,确保手术的顺利进行。可以极大降低创伤骨科手术的技术门槛,提高基层医疗人员的专业水平,让更多先进、微创的手术治疗方法在基层得到应用推广,让基层的患者得到安全、可靠、有效的医疗服务。
核心技术
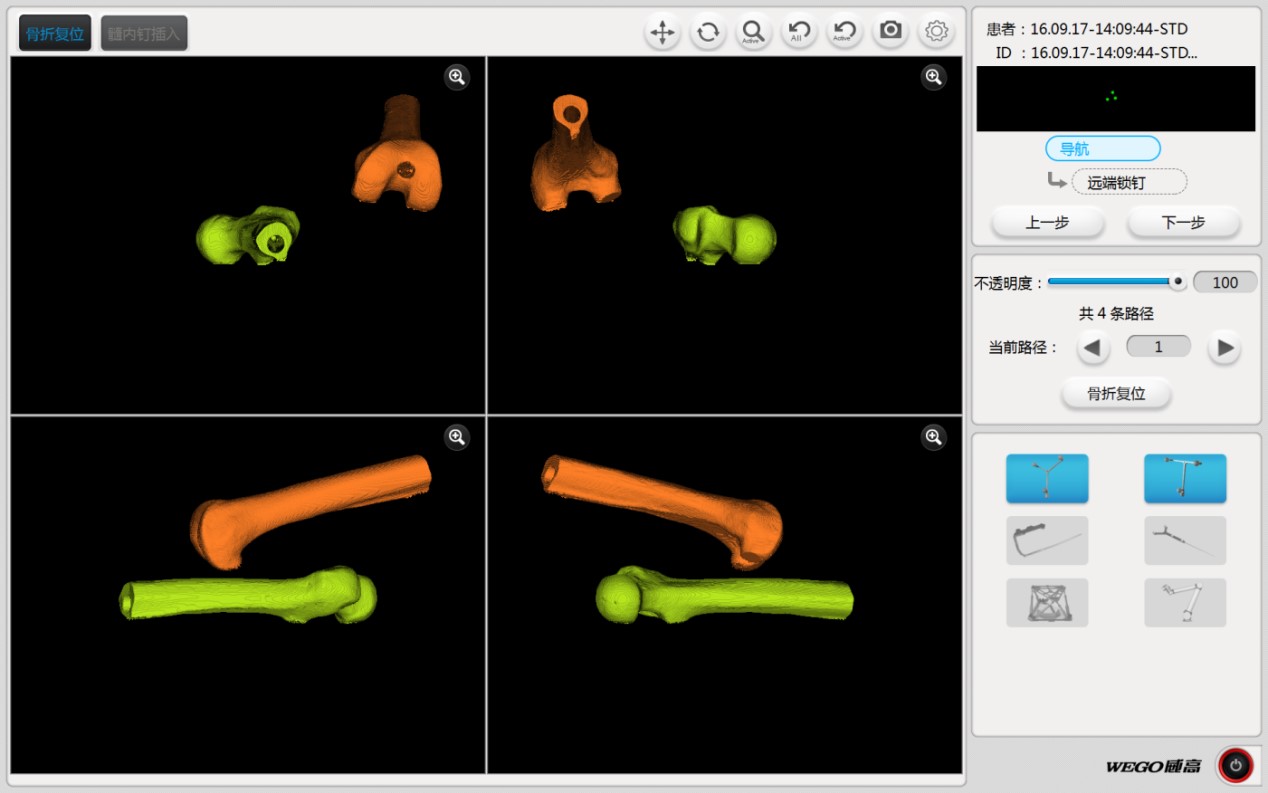
进入实时导航模式时,系统将提前规划的复位路径指令传递给复位机器人。导航软件中规划髓内钉入钉点方位,将指令发给定位机器人,机器人自动指示入钉点方位,外科医生置入导向套筒,电钻打入克氏针,置入股骨髓内钉。导航软件中规划髓内钉远端锁钉方位,将指令传递给定位机器人,机器人自动指示锁钉方位,外科医生置入导向套筒,电钻打入克氏针,置入远端锁钉。对骨折复位操作进行自动路径规划和预览,确保复位过程不会发生骨骼间的碰撞。
系统优势
案例
由威海威高骨科手术机器人有限公司、中国人民解放军总医院、北京航空航天大学、北京航天总医院、与我司合作研发的“创伤骨科治疗机器人”是一款模块化的远程诊治骨科机器人,同时是世界上首个高度集成的骨科智能手术系统。同方鼎欣提供了稳定可靠的智能医学影像处理、分析、传输、智能诊疗系统等技术支持,帮助机器人完成各项精确操作,确保手术的顺利进行。“创伤骨科治疗机器人”将智能化精准医疗得以实现,填补了中国自主高科技智能医疗设备的空白,引领中国智能医疗设备进入世界领先行列。

图为2016年6月,本项目亮相由科技部及相关部门组织的国家“十二五”科技创新成就展
 京公网安备 11010802024764号
京公网安备 11010802024764号